Java sockets I/O: blocking, non-blocking and asynchronous
Introduction
When describing I/O, the terms non-blocking and asynchronous are often used interchangeably, but there is a significant difference between them. In this article are described the theoretical and practical differences between non-blocking and asynchronous sockets I/O operations in Java.
Sockets are endpoints to perform two-way communication by TCP and UDP protocols. Java sockets APIs are adapters for the corresponding functionality of the operating systems. Sockets communication in POSIX-compliant operating systems (Unix, Linux, Mac OS X, BSD, Solaris, AIX, etc.) is performed by Berkeley sockets. Sockets communication in Windows is performed by Winsock that is also based on Berkeley sockets with additional functionality to comply with the Windows programming model.
The POSIX definitions
In this article are used simplified definitions from the POSIX specification.
Blocked thread - a thread that is waiting for some condition before it can continue execution.
Blocking - a property of a socket that causes calls to it to wait for the requested action to be performed before returning.
Non-blocking - a property of a socket that causes calls to it to return without delay, when it is detected that the requested action cannot be completed without an unknown delay.
Synchronous I/O operation - an I/O operation that causes the requesting thread to be blocked until that I/O operation completes.
Asynchronous I/O operation - an I/O operation that doesn’t of itself cause the requesting thread to be blocked; this implies that the thread and the I/O operation may be running concurrently.
So, according to the POSIX specification, the difference between the terms non-blocking and asynchronous is obvious:
- non-blocking - a property of a socket that causes calls to it to return without delay
- asynchronous I/O - a property on an I/O operation (reading or writing) that runs concurrently with the requesting thread
I/O models
The following I/O models are the most common for the POSIX-compliant operating systems:
- blocking I/O model
- non-blocking I/O model
- I/O multiplexing model
- signal-driven I/O model
- asynchronous I/O model
Blocking I/O model
In the blocking I/O model, the application makes a blocking system call until data are received at the kernel and are copied from kernel space into user space.
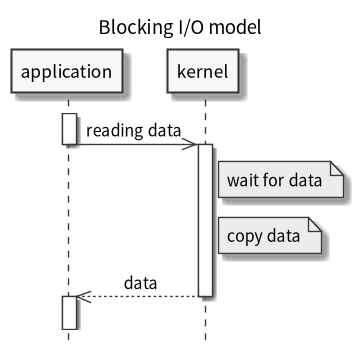
Pros:
- The simplest I/O model to implement
Cons:
- The application is blocked
Non-blocking I/O model
In the non-blocking I/O model the application makes a system call that immediately returns one of two responses:
- if the I/O operation can be completed immediately, the data are returned
- if the I/O operation can’t be completed immediately, an error code is returned indicating that the I/O operation would block or the device is temporarily unavailable
To complete the I/O operation, the application should busy-wait (make repeating system calls) until completion.
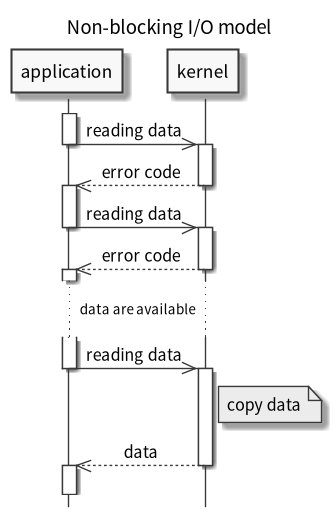
Pros:
- The application isn’t blocked
Cons:
- The application should busy-wait until completion, that would cause many user-kernel context switches
- This model can introduce I/O latency because there can be a gap between the data availability in the kernel and the data reading by the application
I/O multiplexing model
In the I/O multiplexing model (also known as the non-blocking I/O model with blocking notifications), the application makes a blocking select system call to start to monitor activity on many descriptors. For each descriptor, it’s possible to request notification of its readiness for certain I/O operations (connection, reading or writing, error occurrence, etc.). When the select system call returns that at least one descriptor is ready, the application makes a non-blocking call and copies the data from kernel space into user space.
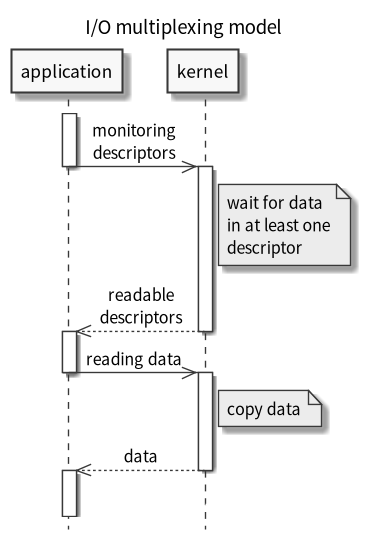
Pros:
- It’s possible to perform I/O operations on multiple descriptors in one thread
Cons:
- The application is still blocked on the select system call
- Not all operating systems support this model efficiently
Signal-driven I/O model
In the signal-driven I/O model the application makes a non-blocking call and registers a signal handler. When a descriptor is ready for an I/O operation, a signal is generated for the application. Then the signal handler copies the data from kernel space into user space.
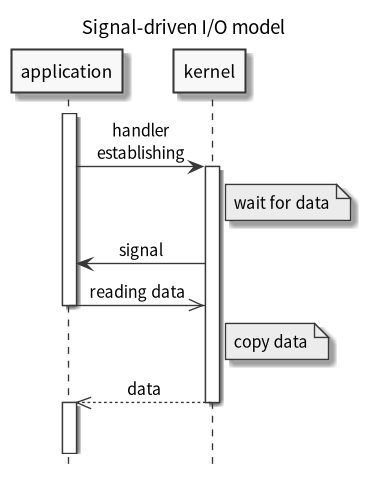
Pros:
- The application isn’t blocked
- Signals can provide good performance
Cons:
- Not all operating systems support signals
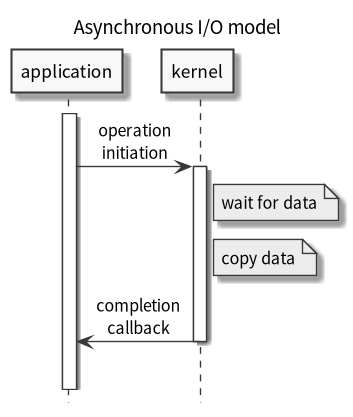
Asynchronous I/O model
In the asynchronous I/O model (also known as the overlapped I/O model) the application makes the non-blocking call and starts a background operation in the kernel. When the operation is completed (data are received at the kernel and are copied from kernel space into user space), a completion callback is generated to finish the I/O operation.
A difference between the asynchronous I/O model and the signal-driven I/O model is that with signal-driven I/O, the kernel tells the application when an I/O operation can be initiated, but with the asynchronous I/O model, the kernel tells the application when an I/O operation is completed.
Pros:
- The application isn’t blocked
- This model can provide the best performance
Cons:
- The most complicated I/O model to implement
- Not all operating systems support this model efficiently
Java I/O APIs
Java IO API
Java IO API is based on streams (InputStream, OutputStream) that represent blocking, one-directional data flow.
Java NIO API
Java NIO API is based on the Channel, Buffer, Selector classes, that are adapters to low-level I/O operations of operating systems.
The Channel class represents a connection to an entity (hardware device, file, socket, software component, etc) that is capable of performing I/O operations (reading or writing).
In comparison with uni-directional streams, channels are bi-directional.
The Buffer class is a fixed-size data container with additional methods to read and write data. All Channel data are handled through Buffer but never directly: all data that are sent to a Channel are written into a Buffer, all data that are received from a Channel are read into a Buffer.
In comparison with streams, that are byte-oriented, channels are block-oriented. Byte-oriented I/O is simpler but for some I/O entities can be rather slow. Block-oriented I/O can be much faster but is more complicated.
The Selector class allows subscribing to events from many registered SelectableChannel objects in a single call. When events arrive, a Selector object dispatches them to the corresponding event handlers.
Java NIO2 API
Java NIO2 API is based on asynchronous channels (AsynchronousServerSocketChannel, AsynchronousSocketChannel, etc) that support asynchronous I/O operations (connecting, reading or writing, errors handling).
The asynchronous channels provide two mechanisms to control asynchronous I/O operations. The first mechanism is by returning a java.util.concurrent.Future object, which models a pending operation and can be used to query the state and obtain the result. The second mechanism is by passing to the operation a java.nio.channels.CompletionHandler object, which defines handler methods that are executed after the operation has completed or failed. The provided API for both mechanisms are equivalent.
Asynchronous channels provide a standard way of performing asynchronous operations platform-independently. However, the amount that Java sockets API can exploit native asynchronous capabilities of an operating system, will depend on the support for that platform.
Socket echo server
Most of the I/O models mentioned above are implemented here in echo servers and clients with Java sockets APIs. The echo servers and clients work by the following algorithm:
- a server listens to a socket on a registered TCP port 7000
- a client connects from a socket on a dynamic TCP port to the server socket
- the client reads an input string from the console and sends the bytes from its socket to the server socket
- the server receives the bytes from its socket and sends them back to the client socket
- the client receives the bytes from its socket and writes the echoed string on the console
- when the client receives the same number of bytes that it has sent, it disconnects from the server
- when the server receives a special string, it stops listening
The conversion between strings and bytes here is performed explicitly in UTF-8 encoding.
Further only simplified codes for echo servers are provided. The link to the complete codes for echo servers and clients is provided in the conclusion.
Blocking IO echo server
In the following example, the blocking I/O model is implemented in an echo server with Java IO API.
The ServerSocket.accept method blocks until a connection is accepted. The InputStream.read method blocks until input data are available, or a client is disconnected. The OutputStream.write method blocks until all output data are written.
public class IoEchoServer {
public static void main(String[] args) throws IOException {
ServerSocket serverSocket = new ServerSocket(7000);
while (active) {
Socket socket = serverSocket.accept(); // blocking
InputStream is = socket.getInputStream();
OutputStream os = socket.getOutputStream();
int read;
byte[] bytes = new byte[1024];
while ((read = is.read(bytes)) != -1) { // blocking
os.write(bytes, 0, read); // blocking
}
socket.close();
}
serverSocket.close();
}
}
Blocking NIO echo server
In the following example, the blocking I/O model is implemented in an echo server with Java NIO API.
The ServerSocketChannel and SocketChannel objects are by default configured in the blocking mode. The ServerSocketChannel.accept method blocks and returns a SocketChannel object when a connection is accepted. The ServerSocket.read method blocks until input data are available, or a client is disconnected. The ServerSocket.write method blocks until all output data are written.
public class NioBlockingEchoServer {
public static void main(String[] args) throws IOException {
ServerSocketChannel serverSocketChannel = ServerSocketChannel.open();
serverSocketChannel.bind(new InetSocketAddress("localhost", 7000));
while (active) {
SocketChannel socketChannel = serverSocketChannel.accept(); // blocking
ByteBuffer buffer = ByteBuffer.allocate(1024);
while (true) {
buffer.clear();
int read = socketChannel.read(buffer); // blocking
if (read < 0) {
break;
}
buffer.flip();
socketChannel.write(buffer); // blocking
}
socketChannel.close();
}
serverSocketChannel.close();
}
}
Non-blocking NIO echo server
In the following example, the non-blocking I/O model is implemented in an echo server with Java NIO API.
The ServerSocketChannel and SocketChannel objects are explicitly configured in the non-blocking mode. The ServerSocketChannel.accept method doesn’t block and returns null if no connection is accepted yet or a SocketChannel object otherwise. The ServerSocket.read doesn’t block and returns 0 if no data are available or a positive number of bytes read otherwise. The ServerSocket.write method doesn’t block if there is free space in the socket’s output buffer.
public class NioNonBlockingEchoServer {
public static void main(String[] args) throws IOException {
ServerSocketChannel serverSocketChannel = ServerSocketChannel.open();
serverSocketChannel.configureBlocking(false);
serverSocketChannel.bind(new InetSocketAddress(7000));
while (active) {
SocketChannel socketChannel = serverSocketChannel.accept(); // non-blocking
if (socketChannel != null) {
socketChannel.configureBlocking(false);
ByteBuffer buffer = ByteBuffer.allocate(1024);
while (true) {
buffer.clear();
int read = socketChannel.read(buffer); // non-blocking
if (read < 0) {
break;
}
buffer.flip();
socketChannel.write(buffer); // can be non-blocking
}
socketChannel.close();
}
}
serverSocketChannel.close();
}
}
Multiplexing NIO echo server
In the following example, the multiplexing I/O model is implemented in an echo server Java NIO API.
During the initialization, multiple ServerSocketChannel objects, that are configured in the non-blocking mode, are registered on the same Selector object with the SelectionKey.OP_ACCEPT argument to specify that an event of connection acceptance is interesting.
In the main loop, the Selector.select method blocks until at least one of the registered events occurs. Then the Selector.selectedKeys method returns a set of the SelectionKey objects for which events have occurred. Iterating through the SelectionKey objects, it’s possible to determine what I/O event (connect, accept, read, write) has happened and which sockets objects (ServerSocketChannel, SocketChannel) have been associated with that event.
Indication of a selection key that a channel is ready for some operation is a hint, not a guarantee.
public class NioMultiplexingEchoServer {
public static void main(String[] args) throws IOException {
final int ports = 8;
ServerSocketChannel[] serverSocketChannels = new ServerSocketChannel[ports];
Selector selector = Selector.open();
for (int p = 0; p < ports; p++) {
ServerSocketChannel serverSocketChannel = ServerSocketChannel.open();
serverSocketChannels[p] = serverSocketChannel;
serverSocketChannel.configureBlocking(false);
serverSocketChannel.bind(new InetSocketAddress("localhost", 7000 + p));
serverSocketChannel.register(selector, SelectionKey.OP_ACCEPT);
}
while (active) {
selector.select(); // blocking
Iterator<SelectionKey> keysIterator = selector.selectedKeys().iterator();
while (keysIterator.hasNext()) {
SelectionKey key = keysIterator.next();
if (key.isAcceptable()) {
accept(selector, key);
}
if (key.isReadable()) {
keysIterator.remove();
read(selector, key);
}
if (key.isWritable()) {
keysIterator.remove();
write(key);
}
}
}
for (ServerSocketChannel serverSocketChannel : serverSocketChannels) {
serverSocketChannel.close();
}
}
}
When a SelectionKey object indicates that a connection acceptance event has happened, it’s made the ServerSocketChannel.accept call (which can be a non-blocking) to accept the connection. After that, a new SocketChannel object is configured in the non-blocking mode and is registered on the same Selector object with the SelectionKey.OP_READ argument to specify that now an event of reading is interesting.
private static void accept(Selector selector, SelectionKey key) throws IOException {
ServerSocketChannel serverSocketChannel = (ServerSocketChannel) key.channel();
SocketChannel socketChannel = serverSocketChannel.accept(); // can be non-blocking
if (socketChannel != null) {
socketChannel.configureBlocking(false);
socketChannel.register(selector, SelectionKey.OP_READ);
}
}
When a SelectionKey object indicates that a reading event has happened, it’s made a the SocketChannel.read call (which can be a non-blocking) to read data from the SocketChannel object into a new ByteByffer object. After that, the SocketChannel object is registered on the same Selector object with the SelectionKey.OP_WRITE argument to specify that now an event of write is interesting. Additionally, this ByteBuffer object is used during the registration as an attachment.
private static void read(Selector selector, SelectionKey key) throws IOException {
SocketChannel socketChannel = (SocketChannel) key.channel();
ByteBuffer buffer = ByteBuffer.allocate(1024);
socketChannel.read(buffer); // can be non-blocking
buffer.flip();
socketChannel.register(selector, SelectionKey.OP_WRITE, buffer);
}
When a SelectionKeys object indicates that a writing event has happened, it’s made the SocketChannel.write call (which can be a non-blocking) to write data to the SocketChannel object from the ByteByffer object, extracted from the SelectionKey.attachment method. After that, the SocketChannel.cloase call closes the connection.
private static void write(SelectionKey key) throws IOException {
SocketChannel socketChannel = (SocketChannel) key.channel();
ByteBuffer buffer = (ByteBuffer) key.attachment();
socketChannel.write(buffer); // can be non-blocking
socketChannel.close();
}
After every reading or writing the SelectionKey object is removed from the set of the SelectionKey objects to prevent its reuse. But the SelectionKey object for connection acceptance is not removed to have the ability to make the next similar operation.
Asynchronous NIO2 echo server
In the following example, the asynchronous I/O model is implemented in an echo server with Java NIO2 API. The AsynchronousServerSocketChannel, AsynchronousSocketChannel classes here are used with the completion handlers mechanism.
The AsynchronousServerSocketChannel.accept method initiates an asynchronous connection acceptance operation.
public class Nio2CompletionHandlerEchoServer {
public static void main(String[] args) throws IOException {
AsynchronousServerSocketChannel serverSocketChannel = AsynchronousServerSocketChannel.open();
serverSocketChannel.bind(new InetSocketAddress(7000));
AcceptCompletionHandler acceptCompletionHandler = new AcceptCompletionHandler(serverSocketChannel);
serverSocketChannel.accept(null, acceptCompletionHandler);
System.in.read();
}
}
When a connection is accepted (or the operation fails), the AcceptCompletionHandler class is called, which by the AsynchronousSocketChannel.read(ByteBuffer destination, A attachment, CompletionHandler<Integer,? super A> handler) method initiates an asynchronous read operation from the AsynchronousSocketChannel object to a new ByteBuffer object.
class AcceptCompletionHandler implements CompletionHandler<AsynchronousSocketChannel, Void> {
private final AsynchronousServerSocketChannel serverSocketChannel;
AcceptCompletionHandler(AsynchronousServerSocketChannel serverSocketChannel) {
this.serverSocketChannel = serverSocketChannel;
}
@Override
public void completed(AsynchronousSocketChannel socketChannel, Void attachment) {
serverSocketChannel.accept(null, this); // non-blocking
ByteBuffer buffer = ByteBuffer.allocate(1024);
ReadCompletionHandler readCompletionHandler = new ReadCompletionHandler(socketChannel, buffer);
socketChannel.read(buffer, null, readCompletionHandler); // non-blocking
}
@Override
public void failed(Throwable t, Void attachment) {
// exception handling
}
}
When the read operation completes (or fails), the ReadCompletionHandler class is called, which by the AsynchronousSocketChannel.write(ByteBuffer source, A attachment, CompletionHandler<Integer,? super A> handler) method initiates an asynchronous write operation to the AsynchronousSocketChannel object from the ByteBuffer object.
class ReadCompletionHandler implements CompletionHandler<Integer, Void> {
private final AsynchronousSocketChannel socketChannel;
private final ByteBuffer buffer;
ReadCompletionHandler(AsynchronousSocketChannel socketChannel, ByteBuffer buffer) {
this.socketChannel = socketChannel;
this.buffer = buffer;
}
@Override
public void completed(Integer bytesRead, Void attachment) {
WriteCompletionHandler writeCompletionHandler = new WriteCompletionHandler(socketChannel);
buffer.flip();
socketChannel.write(buffer, null, writeCompletionHandler); // non-blocking
}
@Override
public void failed(Throwable t, Void attachment) {
// exception handling
}
}
When the write operation completes (or fails), the WriteCompletionHandler class is called, which by the AsynchronousSocketChannel.close method closes the connection.
class WriteCompletionHandler implements CompletionHandler<Integer, Void> {
private final AsynchronousSocketChannel socketChannel;
WriteCompletionHandler(AsynchronousSocketChannel socketChannel) {
this.socketChannel = socketChannel;
}
@Override
public void completed(Integer bytesWritten, Void attachment) {
try {
socketChannel.close();
} catch (IOException e) {
// exception handling
}
}
@Override
public void failed(Throwable t, Void attachment) {
// exception handling
}
}
In this example, asynchronous I/O operations are performed without attachment, because all the necessary objects (AsynchronousSocketChannel, ByteBuffer) are passed as constructor arguments for the appropriate completion handlers.
Conclusion
The choice of the I/O model for sockets communication depends on the parameters of the traffic. If I/O requests are long and infrequent, asynchronous I/O is generally a good choice. However, if I/O requests are short and fast, the overhead of processing kernel calls may make synchronous I/O much better.
Despite that Java provides a standard way of performing sockets I/O in the different operating systems, the actual performance can vary significantly depending on their implementation. It’s possible to start studying these differences with Dan Kegel’s well-known article The C10K problem.
Complete code examples are available in the GitHub repository.